


用创造力定义未来边界
坚持热爱 追求卓越
同心筑梦 同行共进
视野将更丰富
在这里,你可以
-
掌握前沿技术
与行业顶尖专家并肩作战
深度参与人形机器人全域自研项目 -
加快个人成长
参与前沿技术分享与培训
不断突破你的边界,与团队共同进步 -

激发创新活力
在开放包容的环境中,你的创意
被充分尊重,在更多领域实现自我价值 -

收获高酬回报
我们提供具有市场竞争力的薪酬福利
让你的每一份付出都得到认可与回报
探索中收获成长和快乐
在这里,一起成为更好的我们
专题讲座「从多模态认知到具身执行」
邀请行业大咖线下授课,现场答疑

Icy
人力资源部,HRBP
“我们特邀行业专家深入解析多模态认知与具身执行技术,分享前沿理论与实战案例。团队成员全程热情参与,开放的学习氛围和积极的互动让每一次分享都成为成长契机。在这里,你不是单打独斗——我们共同学习、共同突破。”


Peter
产品应用部,技术专家
“每天走进办公室,宽敞明亮的环境让人倍感舒适。在这里,工作不仅是挑战,更是激发创新与协作的舞台。”
Kai
操作算法部,实习生
“办公室随处可见的绿植,让每天工作都充满活力;免费的咖啡和不定期的下午茶,更是满满的关怀。团队氛围轻松包容,大家像朋友一样相处。


Cloud
供应链,供应链总监
“这里团队氛围特别好,大家像家人一样互相支持,共同解决每一个挑战。做到能快速响应市场需求,确保产品高效交付。

Evely
市场营销中心,市场专员
“我们的产品和服务深受客户信赖。同时,公司鼓励创新,可以自由尝试新的营销方式和工具,提升自己的专业能力。


在欢笑中凝聚彼此情谊
这里是我们共同的家



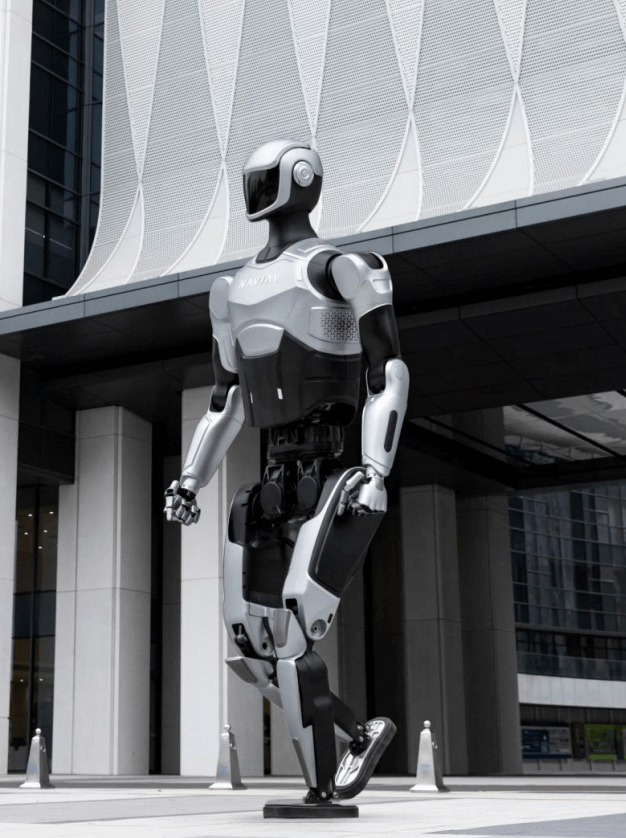





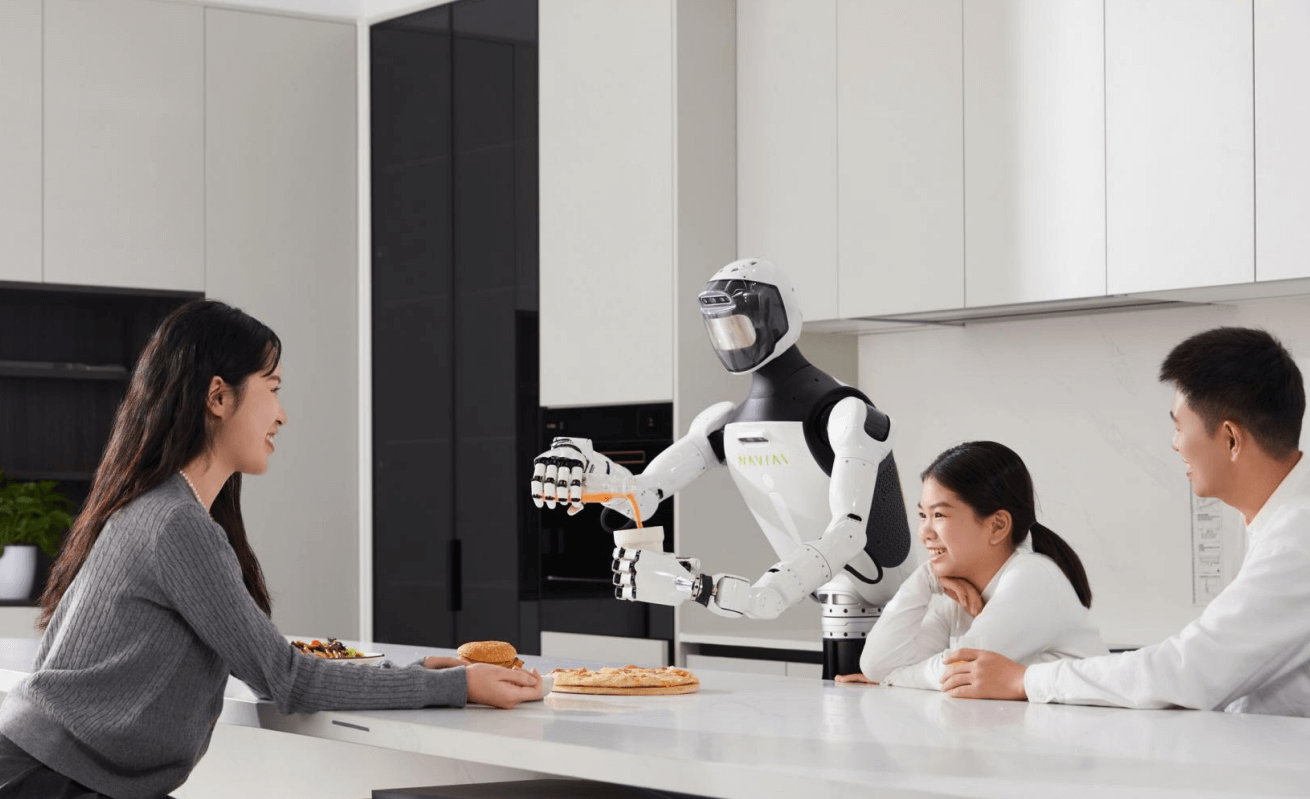


让机器人走进千家万户
做时代的领航者